Сбой F0002 возникает при повышении напряжения питания в звене постоянного тока как при работе приводного механизма в двигательном режиме, так и в режиме рекуперации. Причины возникновения перенапряжения:
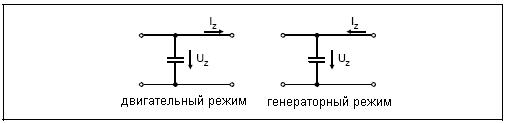
В двигательном режиме энергия передается из питающей сети переменного тока к двигателю через инвертор
На рисунке: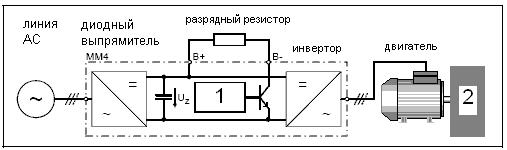
1-драйвер управления IGBT-транзистором, подключающий разрядный резистор параллельно шинам постоянного тока
2-нагрузка на валу двигателя
В двигательном режиме электрическая энергия преобразуется в энергию механического вращения. Диодный выпрямитель преобразует переменное напряжение питающей сети в постоянное напряжение для питания автономного инвертора напряжения (АИН). АИН питает двигатель переменным напряжением с регулируемой частотой, модулируемым из постоянного напряжения от выпрямителя. Перенапряжение в DC-звене в двигательном режиме может произойти при повышении напряжения питающей сети.
- В режиме рекуперации энергия поступает от вращающегося двигателя в питающую преобразователь сеть переменного тока. Такой режим может быть при торможении двигателя инвертором (т.н. контролируемое торможение). В большинстве инверторов переменного тока выпрямитель собран из диодов (неуправляемый), поэтому рекуперация энергии в сеть невозможна. Энергия, рекуперируемая во время работы, расходуется на потери в двигателе, инверторе и подключаемом к двигателю кабеле, остальная энергия расходуется на разрядном резисторе. Резистор подключается параллельно DC-звену и подключается к нему в момент перенапряжений через IGBT-транзистор. При слишком большом количестве рекуперируемой энергии сопротивления разрядного резистора может быть недостаточно для снижения напряжения, и сбой F0003 все равно переводит преобразователь в аварийное состояние. Для дальнейшей работы необходимо сбросить(квитировать) ошибку F003 и принять меры для исключения повторений сбоя. О мерах предупреждения аварии речь пойдет ниже.
 |
Для снижения перенапряжения DC-звена есть несколько методов. Каждый метод обладает специфическими недостатками, поэтому наибольшая эффективность достигается при комплексном решении, идя на компромиссы в пользу безаварийной работы преобразователя. При этом нужно тщательно взвесить все за и против при использовании каждого способа применительно к определенной системе электропривода. Итак,
- Увеличение времени торможения - самый простой метод уменьшить перенапряжение. Для торможения в режиме OFF1 необходимо увеличить значение параметра Р1121. Для торможения в режиме OFF3 - в параметре Р1135. Недостаток метода заключается в том, что он не подходит для механизмов с критическими требованиями к времени торможения(например, позиционные механизмы).
- Включение регулятора Vdc_max в параметре Р1240(установить в 1) позволит отслеживать текущее напряжение DC-звена и
автоматически снижать динамику торможения привода для исключения перенапряжения.
На рисунке показана временная диаграмма, поясняющая принцип работы регулятора. Если значение напряжения превышает значение уставки r1242, включается регулятор Vdc_max и уменьшается интенсивность торможения либо торможение прекращается полностью, и вращение продолжается с неизменной скоростью до снижения напряжения ниже уровня, заданного в r1242. Когда это происходит, торможение продолжается с исходной рампой. Уставка r1242 рассчитывается при параметрировании и определяется по формуле

Преимущество метода заключается в регулировании напряжения DC-звена интенсивностью торможения без появления сбоя F0002.
Недостатком метода является, как и в предыдущем случае, увеличение времени торможения. Также не всегда удастся избежать аварии F002 при управлении U(f), например, при больших моментах инерции привода. - Динамическое торможение позволяет превращать энергию рекуперации в тепловую. Для этого при достижении порога
перенапряжения к DC-звену подключается разрядный(нагрузочный) резистор. При снижении напряжения в DC-звене резистор отключается.
Подключения нагрузочного резистора обеспечиваются ключем IGBT. Преобразователи Micromaster 440 FS A..FS F являются одной из
моделей инверторов со встроенным управляемым ключем IGBT. Для таких преобразователей достаточно подключить только внешний
нагрузочный резистор, без блока торможения! Активация динамического торможения выполняется в параметре Р1237. Резистор
подключается к DC-звену при достижении напряжения промежуточного звена значения Udc, величина которого вычисляется
следующим образом:
-если Р1254=0

-иначе

- При комбинированном торможении к переменному выходному напряжению добавляется постоянная составляющая. Активация
динамического торможения производится путем установки Р1236>0(задается ток комбинированного торможения). Использование данного
типа торможения позволяет снизить время до остановки привода без перенапряжения в DC-звене, но увеличивается шум двигателя и растут
электрические потери, преобразующиеся обмотками двигателя в тепловые. При частых торможениях двигатель может перегреться.
Порог напряжения DC-звена для включения комбинированного торможения рассчитывается так же, как и для динамического торможения. - Торможение постоянным током позволяет быстро затормозить двигатель путем подачи на его статорные обмотки постоянного тока. При активации сигнала DC-торможения запрещаются импульсы инвертора и подается постоянный ток до полного размагничивания. Время размагничивания рассчитывается автоматически, исходя из параметров двигателя. Недостатком метода являются увеличение температуры двигателя(а со временем перегрев), усиление шума при торможении, неконтролируемое ускорение торможения, снижение тормозного момента при снижении скорости.
- Проверить совпадает ли напряжение питающей сети с допустимым диапазоном питания инвертора
- Проверить, активирован ли регулятор DC-звена и правильно ли он настроен
- Увеличить время замедления
Резюме:
| Код сбоя | Причина возникновения сбоя | Методы устранения |
|---|---|---|
| F0002 | Напряжение питания превысило предел при рекуперативной нагрузке |
|